
This is one of the three design of the flute.

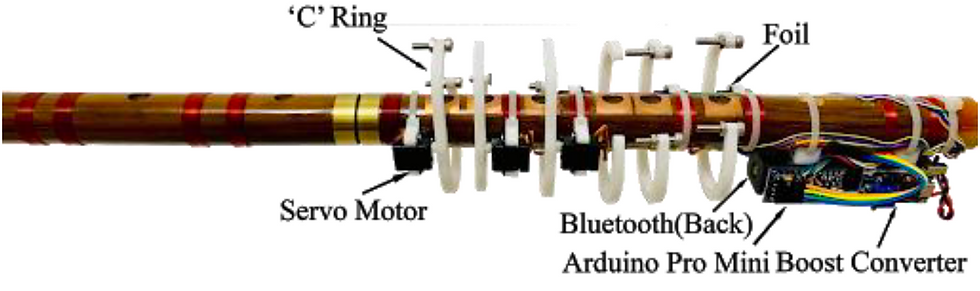
An illustration of the entire haptic interface with the C-ring design.
HAPTIC GUIDANCE FLUTE
The research is conducted in NYU Shanghai, Musix X Lab, under the supervision of Professor Gus Xia. The project is based on the idea from the previous version of Gus Xia's work. To improve the learning interface and the tactile feedback, also, to design a dynamic learning strategy, we updated the hardware devices and software interfaces. "We first adopted a clutch mechanism to enable the interface to turn on and off the haptic control flexibly in real-time. The interactive tutor is then able to follow human performances and apply the “teacher force” only when the software instructs so. Finally, we incorporated the adaptive interface with a step-by-step dynamic learning strategy. Experimental results showed that dynamic learning dramatically outperforms static learning, which boosts the learning rate by 45.3% and shrinks the forgetting chance by 86%" (NIME 2019).
I'm mainly in charge of the C-ring design and the long-term memory rate experiment. To perform guidance, servo motors drive the rotary movement of the “C” shape levers to lift up or push down the corresponding fingers. Such design sets the fingers free from the finger pegs and finger straps, allowing fingers to move both vertically and horizontally. Actually, the rings only need to touch the finger when they apply instructions. Under the mandatory mode, the rings rotate, move the fingers, and hold still. Under the hinted and adaptive mode, the rings rotate, touch the fingers, and immediately rotate back to the mutual position.
The general design and the working mechanism are shown in the left figures ad video. The video is not using the latest wireless device, but except for this part, they are all the same.